あくまで、個人レベルでの、ホビーなので、データとしての信頼性は無い。また、個体差も考慮していない。
基本的な制御方法はこのサイトが詳しい。
[要約]
・パルス幅の零点幅は520usであることが分かった。
・回転角の誤差は1度程度であることが分かった。
・任意のθ[deg]を得るために必要なパルス幅d[us]は、
d= 0.05 θ + 521 [us] で求められることが分かった。
[試験内容]
・パルス幅と回転角の関係
-零点の定義パルスの周期20msをとし、ON時間を0sから10usずつ上昇させながら、サーボが安定した点を0とする。(零点のパルス幅よりも短いパルスを与えた場合、サーボが微小量ずつ回り続ける。)
-測定手順
零点からパルス幅を50usずつ増加させながら、回転角を読み取り、プロットする。
・回転角の精度
-測定手順
目標位置をパルス幅基準で決定し、プラス方向をマイナス方向から交互に接近させて回転角を記録する。また、接近する方向によって振れに差が生じるか調べる。
回転角の読み取りは、サーボモータの下図のように分度器を貼り付けて目視にて行った。


[試験結果]
・零点
測定の結果、回転角に対するパルス幅の零点は520[us]となった。
・パルス幅と回転角の関係
以下の特性グラフが得られた。

零点付近では線形性に乱れが見られるが、その後は概ね線形性を保ったまま増加している。また近似直線は、
(回転角) = (パルス幅) x 20 + 19 [deg]
(パルス幅) = (回転角) x 0.05 + 0.9 + 520 [us]
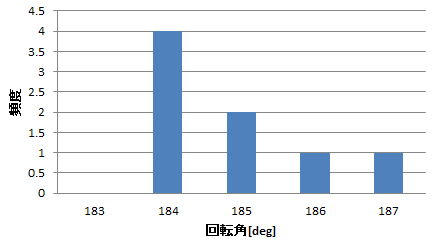
ということがわかる。・回転角の精度
前述の方法で回転角のブレを測定した結果、パルス幅350 + 520[us]に対する回転角の分布は以下のようになった。また標本標準偏差は 1.13 [deg] となった。母数が少ないため統計の信頼性は低いが、概ねの誤差は分かったということにする。
[まとめなど]
測定中、360度サーボ特有(?)の癖に遭遇した。 360度サーボなので、内蔵ポテンショメータに停止点がなく、手で無理やり回すとどこまでも回っていくのだけれども、調子に乗って回し過ぎると、角度の零位置が動いてしまう。はじめはこのことに気づかず、なんども測定をやり直す羽目になった。
本当は、理論曲線と実際の回転角度の比較もしておきたかったのだけれど、今日は眠いのでもう寝ます。おやすみなさい。